Lab 2:Code Of Arms
Please Log In for full access to the web site.
Note that this link will take you to an external site (https://shimmer.mit.edu) to authenticate, and then you will be redirected back to this page.
Quick Reference
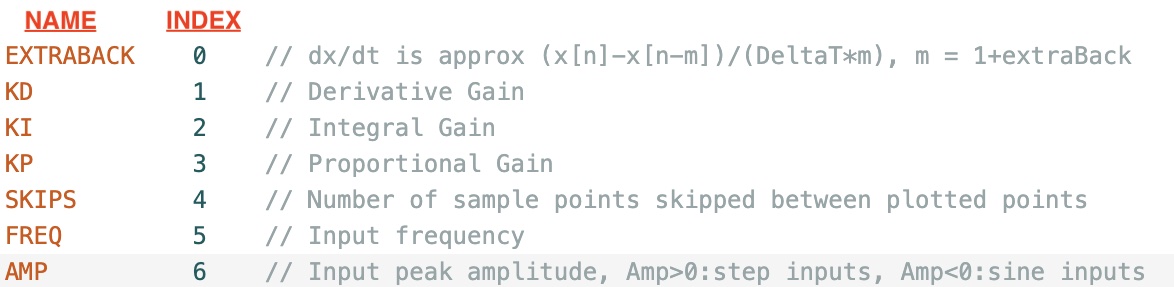
Serial Plotter Send Window Indices
Links
- Build instructions are here.
- Sketch for this lab is here.
- The Matrix Root-Locus and Trajectory Tool is embedded in the Week B section below.
Task Summary
- Build, Calibrate, and Test the Arm Control System (Checkoff 1).
- Investigate the behavior of your arm when using only proportional feedback, K_p, and examine the behavior of difference estimates of the derivative as you change the difference interval m (Checkoff 2).
- Investigate, experimentally, relationships between proportional and derivative feedback gains and arm performance. Pay particular attention to determining when step responses show the impact of nonlinearity.
- Use a combination of proprotional and derivative feedback (by setting non-zero values of K_p and K_d ) to stabilize the arm, and briefly investigate the impact of these gains on disturbance rejection (by dropping a load onto the arm (checkoff 3).
- Relate difference equation natural frequencies to measured arm behavior, and use the relation to estimate \gamma_a (Checkoff 4).
- Extract \gamma_a and \beta coefficients by comparing measured and simulated responses of a PD-controlled by comparing to model simulation using a non-instant 1st-order difference equation model of the command-to-arm-torque relation (Checkoff 5).
- Add integral feedback to your model, and use the model to design a good PID controller. Compare with experiments, and then investigate how the integral term effects the steady-state error when you introduce disturbances (checkoff 6).
Introduction
In the last lab you modeled and determined control parameters for a motor speed control system, a relatively stationary example, and in this lab you will fly! Well, maybe "fly" is a bit of an exaggeration, though there will be motion. You will build a propeller-thrust-driven rotating arm, and you will control the arm's position by using angle measurements to adjust propeller motor drive. Perhaps a few videos (from a previous term using a somewhat different setup!!)...
Arm Wrestling
In the videos above, we show three propeller arm control systems. In the top video, we show what would happen if we used the same proportional feedback controller we used for speed control. In the bottom left, we show a video of using a PID controller, like the one you will be able to design by the end of this lab. And in the bottom right picture, we show you the kind of controller you will be able to design by the end of the term (after we cover state-space and observers).
The Key Challenge
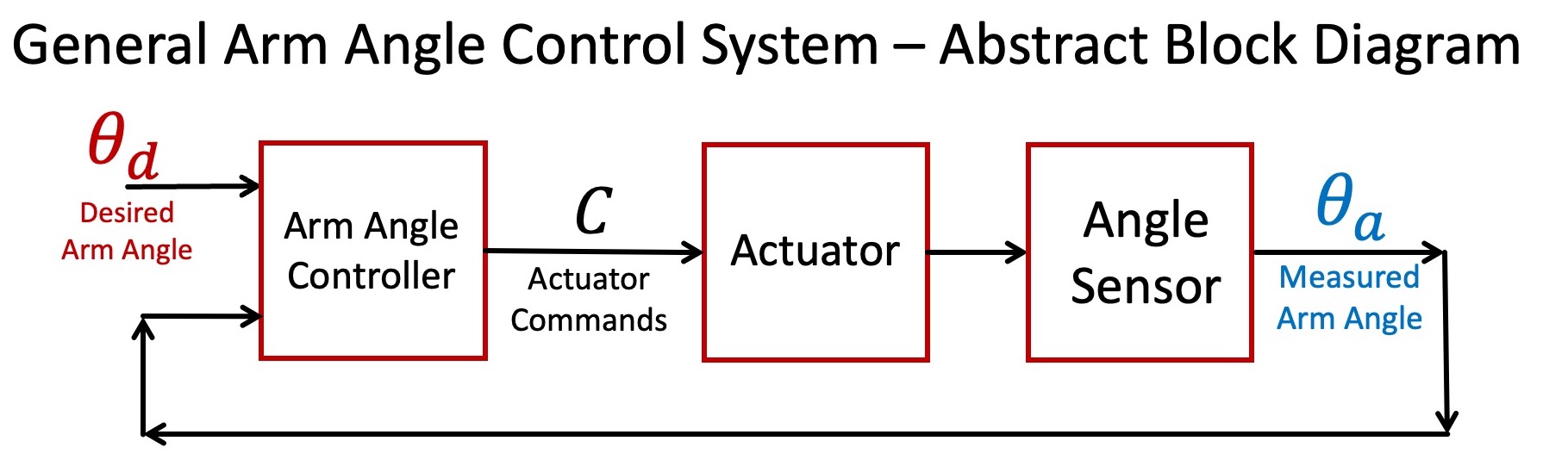
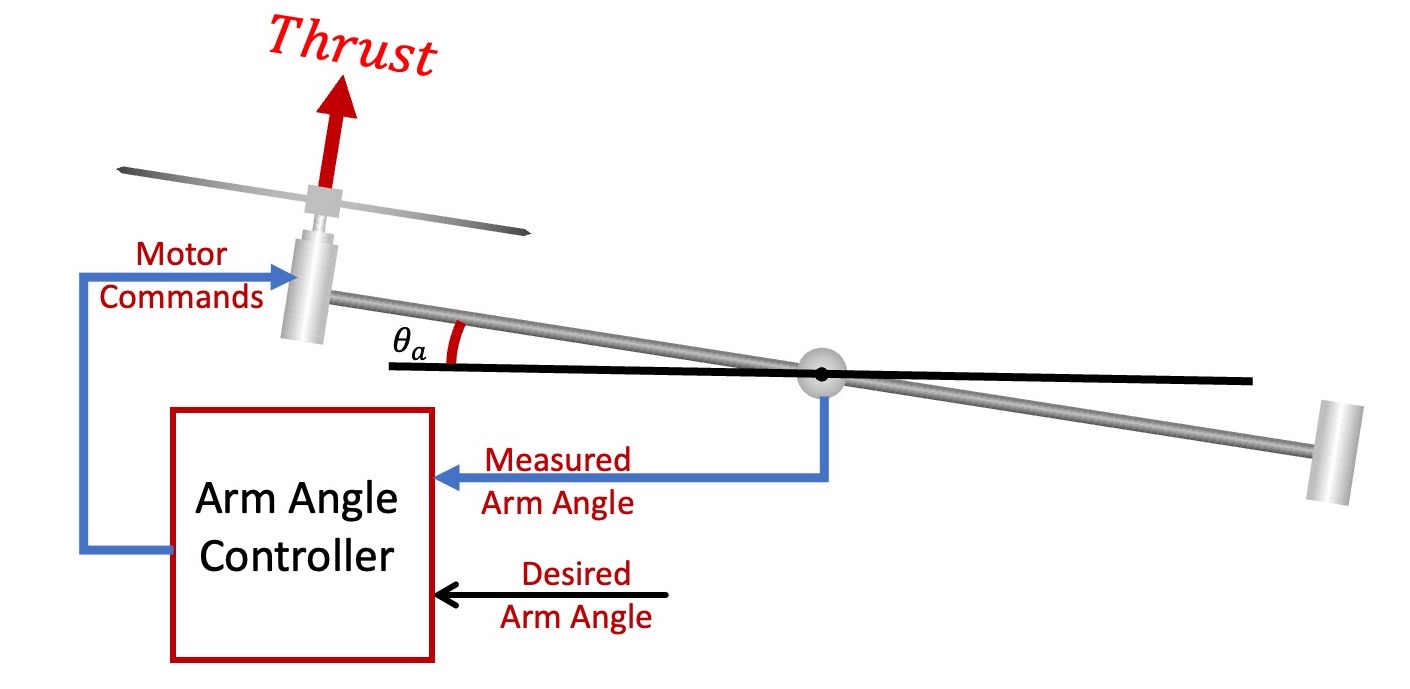
As the abstract block diagram (left panel above) suggests, controlling the rotation angle requires three interconnected functions, an actuator, a sensor and a controller. The angle sensor generates an analog voltage proportional to rotation angle, which is much more direct than the optical encoder sensor used for speed control. But the actuator is more complicated (right panel above). When a motor command is updated by the microcontroller sketch, the voltage across that motor changes, leading to a change in motor speed, which results in a change in propeller thrust, which alters the arm torque, leading to changes in arm angular velocity. The layers of indirection make the control problem challenging, but not uncommonly so, most systems using force-based actuators are similar.
Control Design Approach
Like before, you will model your system and then use the model to help determine a good controller, though for the arm angle control, the modeling and controlling is more complicated. So, you will start with a simple proportional feedback controller, measure the arm behavior, and use those measurements to calibrate a second-order difference equation model of the arm. Then you will use your arm model to determine how the controlled-system's natural frequencies change as a function of proportional(P) and delta(D) (or derivative) feedback gains, and use that insight to design a good PD controller. Success! -ish.
It is possible to find an "okay" PD controller using the second-order arm model, a model accurate enough to predict failure for proportional-only control, but not much more. To achieve better performance, you'll need a more sophisticated controller, and to tune it, you will need a more comprehensive arm model. In particular, you will add an integral (or summation) term to your controller (the "I" in PID), and then tune the three gains (proportional, K_p, derivative, K_d, and integral, K_i) using a model that includes a non-instant relation between changes in motor command and the resulting changes in propeller thrust. And to analyze this complicated controller and model system? For that, you will need to make use of the more sophisticated analysis techniques and computational approaches you've just learned.
Assemble and Test
Please build the propeller-arm control system as described here. Be sure to complete the testing at the end of the assembly guide so that:
- the angle sensor axle is oriented correctly,
- the measured angle displayed by the serial plotter is zero when the arm is horizontal,
- and you've adjusted the nominal motor command so that the associated propeller thrust holds the arm level (that is, horizontal).
Demonstrate your calibrated arm. Use the low proportional gain described in the assembly guide to demonstrate the arm holding itself level. Try blowing on the arm. How well does the arm hold its horizontal position? Set K_p = 0 and adjust the arm position by turning the potentiometer (the same one you adjusted in lab1) to adjust the nominal motor command (and therefore the propeller thrust). Try to adjust the potentiometer so that the arm is rotated to approximately -0.75 radians (-45 degrees, so BELOW level).
How well does the arm hold this position? Now adjust the potentiometer so that the arm is approximately +0.75 radians (+45 degrees, so ABOVE level). How well does the arm hold this position? What fraction of the gravity force on the arm acts to rotate the arm in each case? What is different about the two arm position? Hint: think about how the gravity force changes when you perturbn the arm angle away from +0.75 radians versus how that force changes when you perturb away from -0.75 radians.

Experiment with Proportional Gain
For the second checkoff, we would like you to try some preliminary experiments with proportional feedback, to help you develop an appreciation for the differences between the arm angle and speed control problems.
Determine how the response of the system changes with K_p by using the following procedure:
- Use the send window to set K_p (type "3 0.6" for example).
- Hold the arm (with your hand) so that the serial plotter shows the arm is about 60 milliradians above horizontal.
- Be prepared to stop the plotter -- then let go of the arm!
- Stop the plotter, then stop the arm by grabbing the end of the chop stick or by pulling the large power connector.
- Repeat with a new K_p
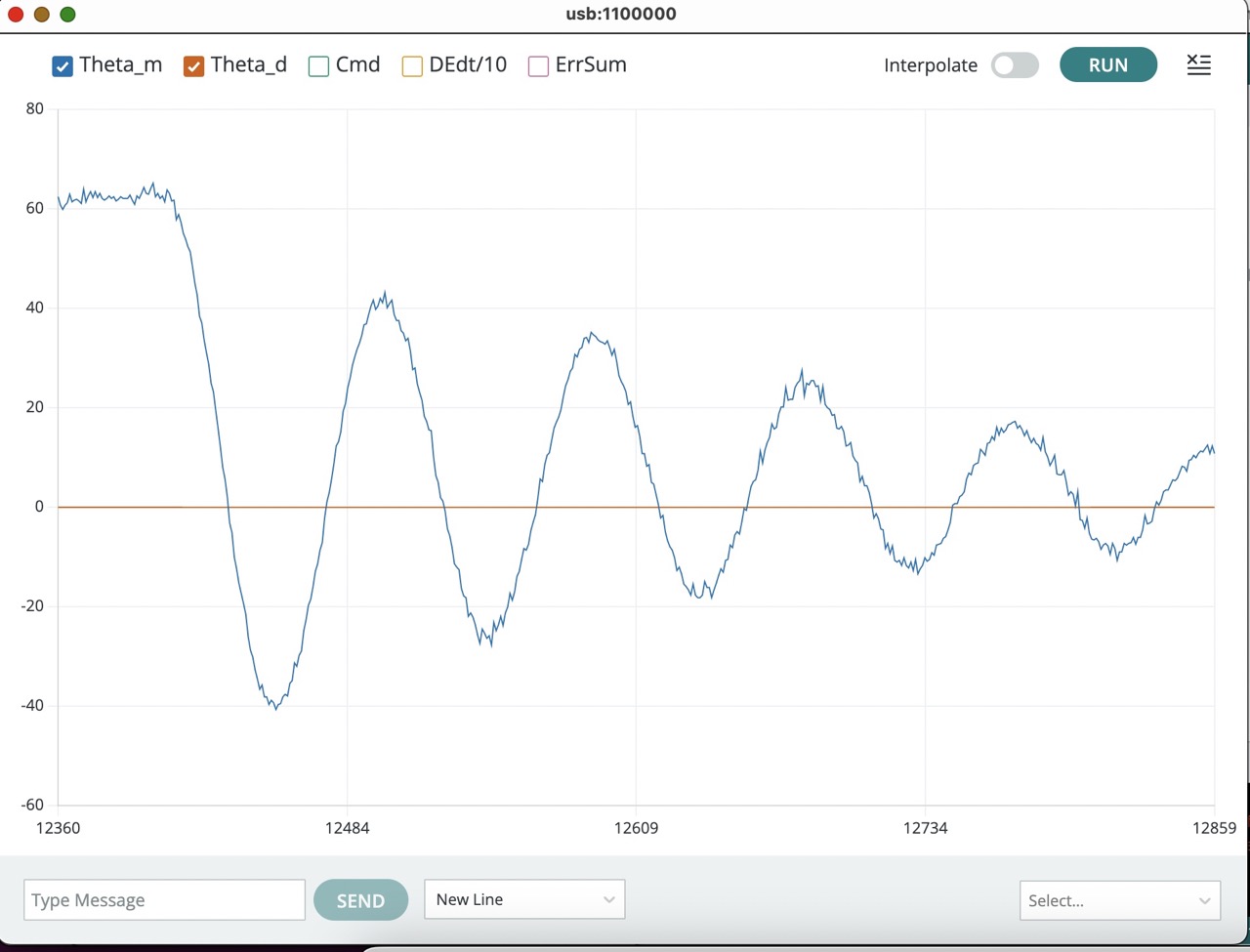
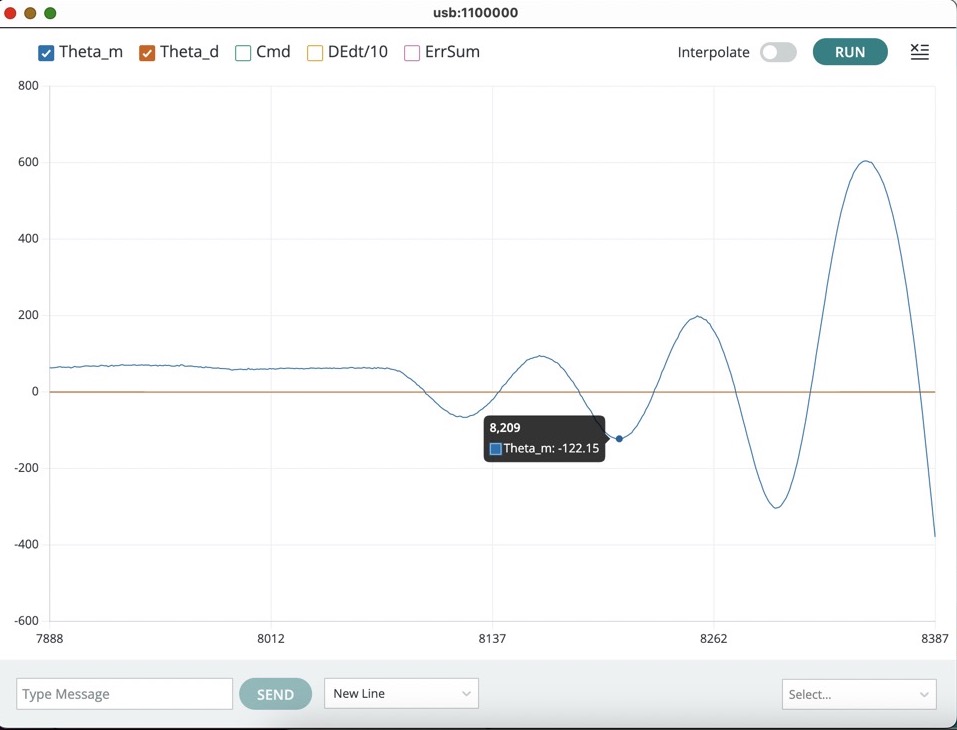
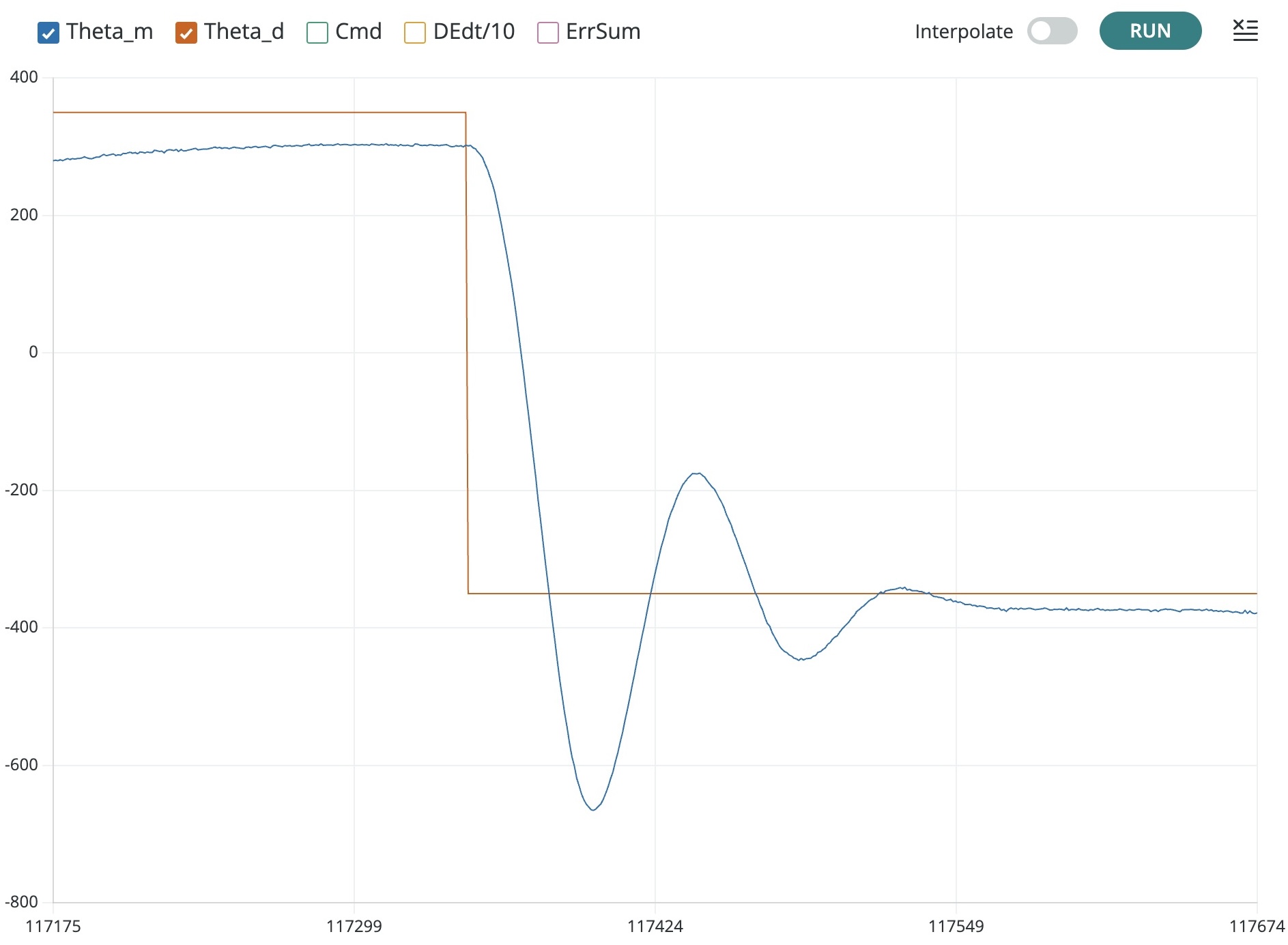
You should be able to find K_p's in the range \frac{1}{4} < K_p < 2 that produce both stable and unstable oscillating behaviors (like the two figures below). Try to find one that is stable (decays to zero like the first figure below), and one that is unstable (like the second figure below). Take screen shots for these two behaviors. You will need them for the checkoff.
Examining Cmd and DEdt/10
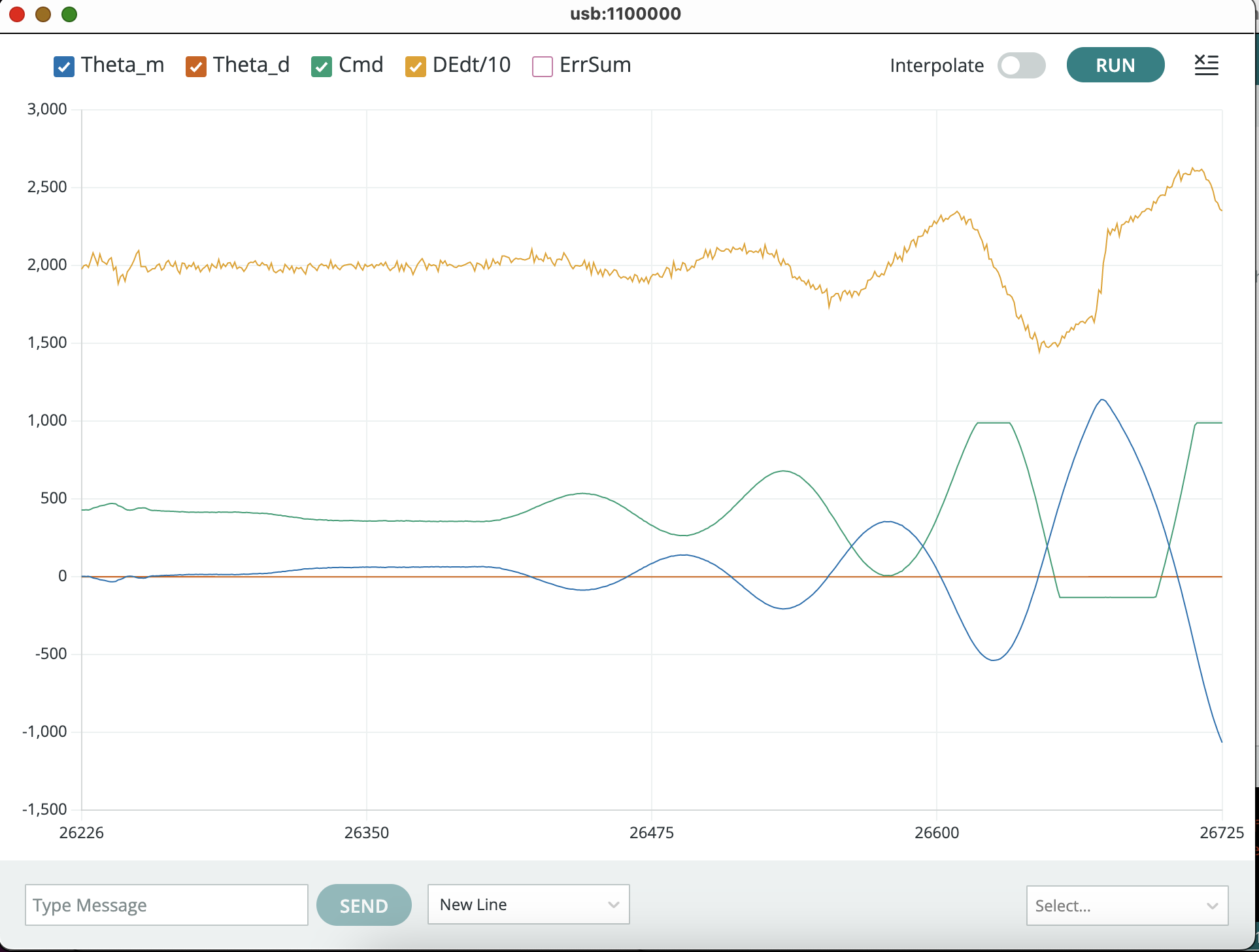
Once you have found a pair of K_p's (one producing decaying, and the other growing, oscillations), turn on the serial plotter plots for the motor command and the derivative of the error, and redo your growing oscillation experiment. You should be able to produce a figure like the one below.
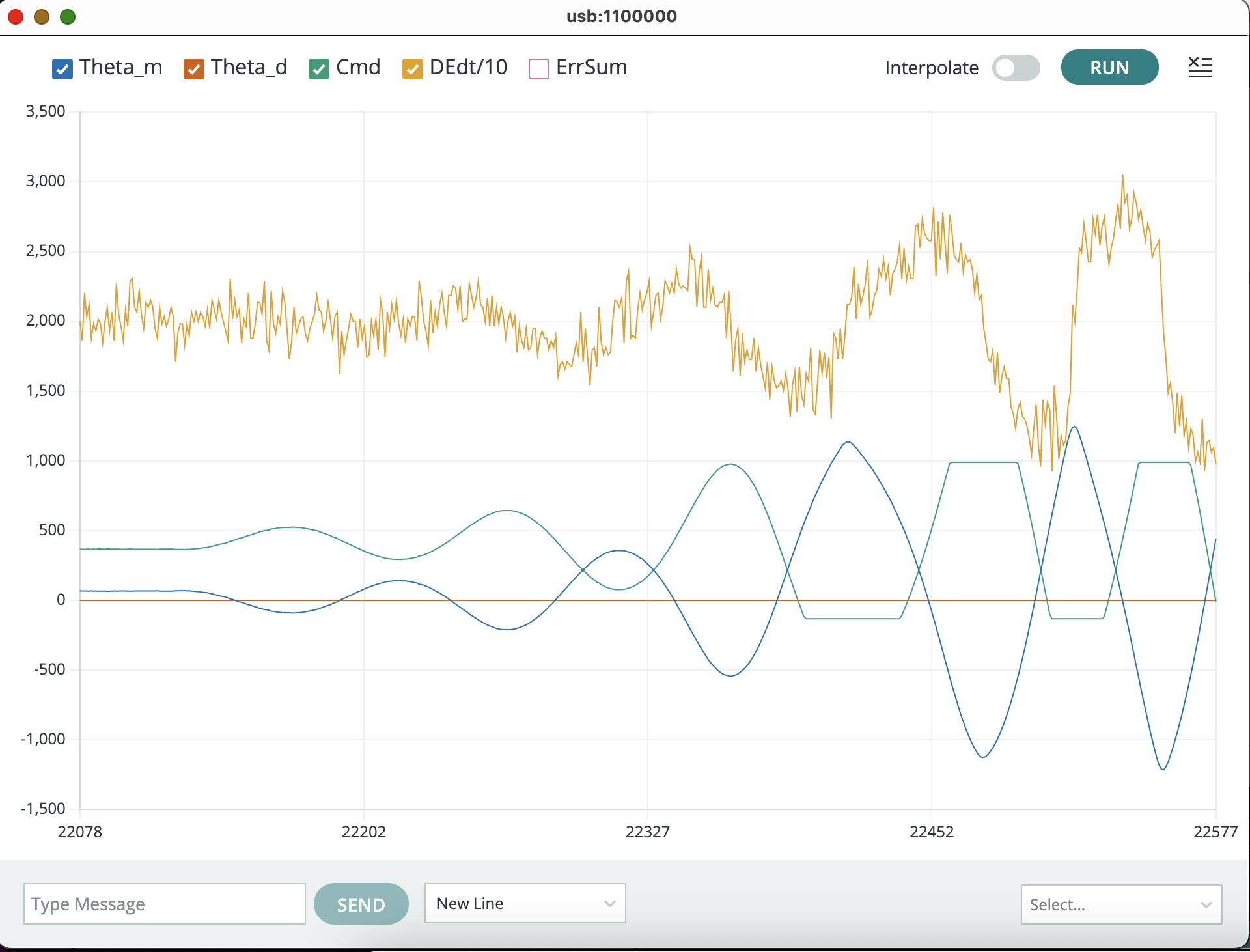
The DEdt plot shows a difference approximation to the time derivative of the arm angle error. The error is defined as the desired minus the measured angle,
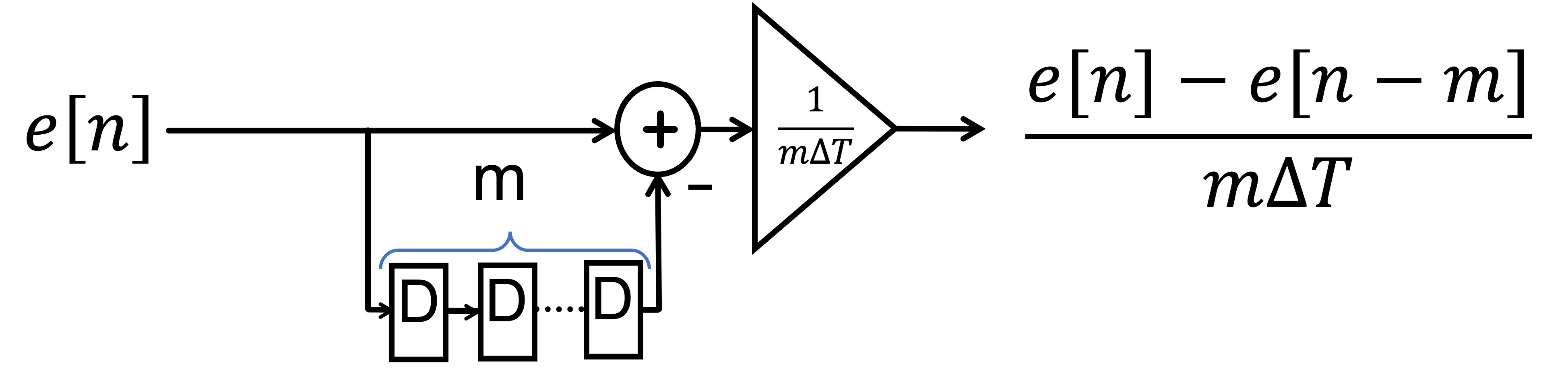
where
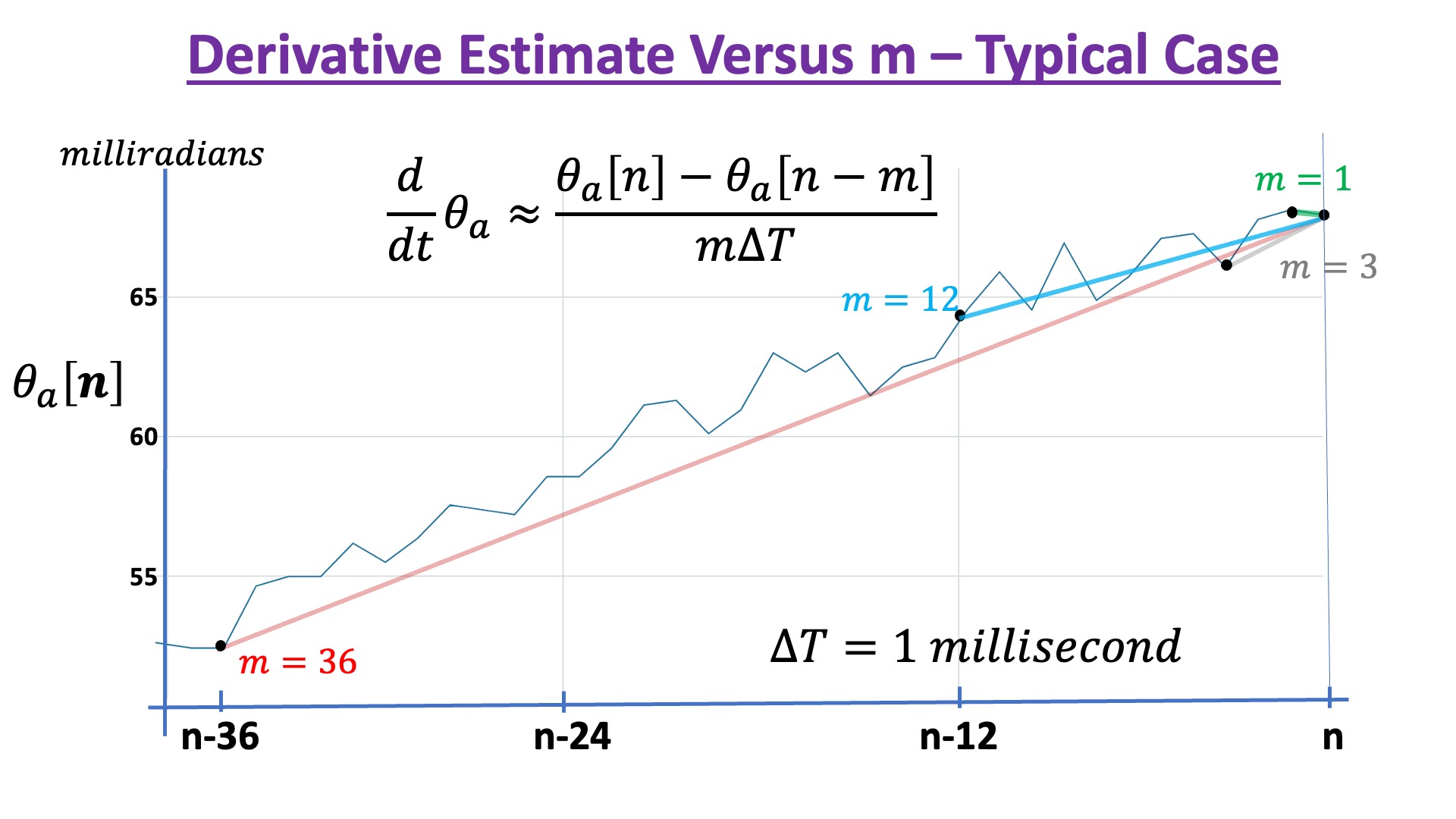
Try increasing m (integers between 1 and 10) using index 0 (EXTRABACK) in the send window. You should be able to set m to produce a figure like the one below.
Show the staff member your screen shots for the largest value of K_p for which your system was stable, that is, the oscillations decayed with a 60 milliradians initial displacement. Show the staff member your screen shots for the smallest value of K_p for which your system was unstable with a 60 milliradians initial displacement. What is the relation between the angle, command, and DEdt signals? Do the peaks in these waveforms line up? How do the waveforms change as m gets bigger? Note that on line 19 in the sketch,
#define offsetExtraBack 2 sets an offset of two for EXTRABACK. When you type "0 2" in the send window, you are setting EXTRABACK to four, and therefore setting m=5 . If you want to set m = 1 , type "0 -2" in the send window.
Disturbing Observations
At the beginning of this lab you observed evidence of nonlinearity: differences in arm behavior when positioned above horizontal versus below horizontal. And as we saw in lecture this past week, adding derivative feedback, K_d, helped stabilize the path following robot, and increasing proportional feedback, K_p, improved disturbance rejection. So for this last checkoff of part A, we would like you to investigate (experimentally) stability, nonlinearity and disturbance rejection.
Stability and Derivative Feedback
To get a feel for using derivative feedback to stabilize the arm, try the following:
- Use the send window to set extraback = 5 (type "0 3" in the send window, to add 3 to offsetExtraBack, which is 2), K_d = 0.2 (type "1 0.2" in the send window) and K_p = 0.5 (type "3 0.5" in the send window). The arm should be level, if not, adjust the potentiometer to level it.
- Set the step frequency to 0.1 (type "5 0.1" in send window), and then set the step amplitude to 0.2 (type "6 0.2").
- Note the step response, and then try setting K_p = 0.75, then K_p = 1.0, 1.25, 1.5, ... Note how the step response changes with increasing K_p. What is the largest K_p you can use before the system becomes unstable?
Evidence of Nonlinearity
How nonlinearity impacts performance can often be predicted using linear system ideas. Try the following large-step experiment:
- Set the step amplitude to 0.35 , K_d=0.1 and K_p=0.6.
- Readjust the command offset potentiometer to best match the steady-state-ish values of the desired and measured arm angles.
- Decrease K_d until your falling step response oscillates a couple of times before settling down.
DIY: Drop It Yourself
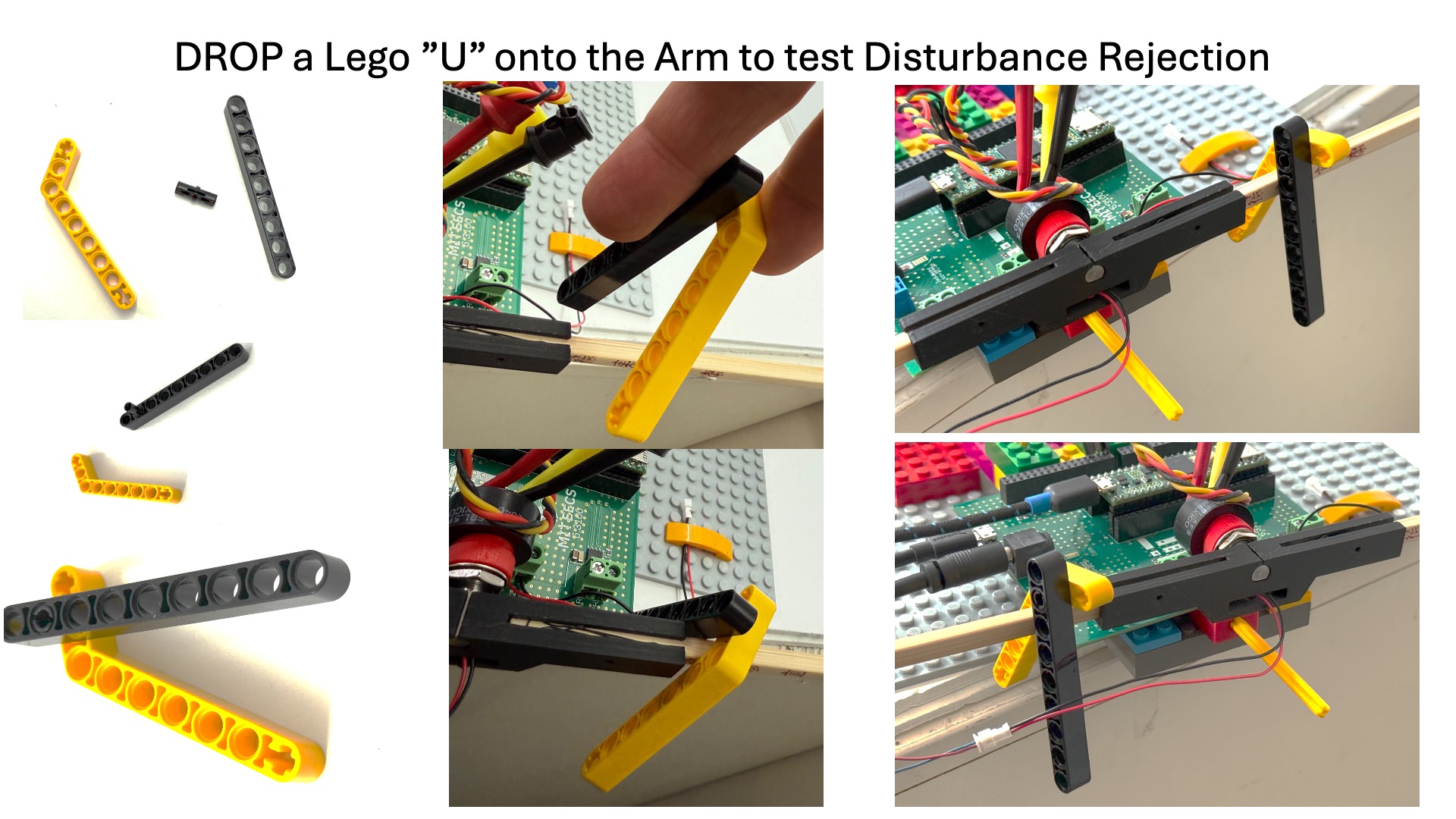
Now lets try disturbing the arm, by dropping a Lego "U" on the arm as shown in the picture below.
- TURN OFF THE STEP INPUT, set the input amplitude to zero (type "6 0.0" in the send window)
- Set K_d = 0.2, K_p = 0.5, .
- Readjust the command offset potentiometer to zero the arm angle.
- Try dropping the Lego "U" on your arm and note how the arm angle changes (drop the "U" close to the angle sensor, so it does not have too much leverage, and try to drop it in the same place when you repeat the experiment below).
- Try setting K_p = 0.75, redrop the "U", and note how much the arm angle changes. Repeat with K_p = 1.0, 1.25, 1.5.
Please prepared to show and explain your experiments to a staff member. Stability: What do you observe about the arm step response as you increase K_p? Nonlinearity: For the large step experiment, what did you observe about the difference between the rising and falling step responses? Can you explain it? (You will probably need some staff help to answer this one!) Disturbance Rejection: What do you observe about the response to the U-drop disturbance as you increase K_p?
STOP HERE FOR WEEK A!!!!
Simple Model, Simple Control
In this section we derive a second-order differential equation model for our propeller arm system under proportional control by assuming that changes in arm torque track changes in motor commands by a scale factor. We use measured arm data, and this admittedly inaccurate model, to estimate the model parameter, $\gamma_a
The Structural and Functional Blocks
The main structural components of our angle control system are blocked out below.
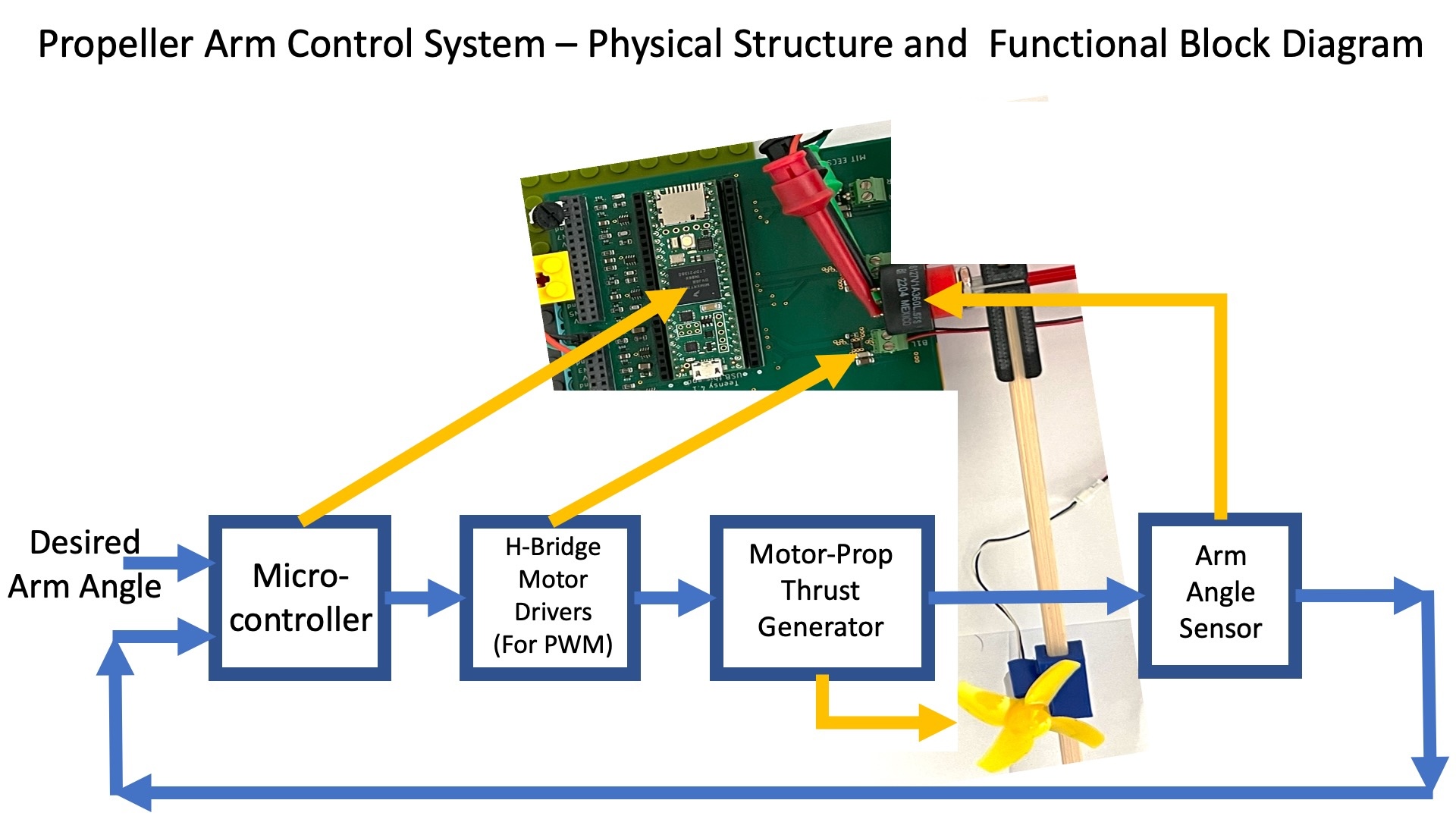
The connection between the structural components and the abstract control functions are detailed in the figure below.
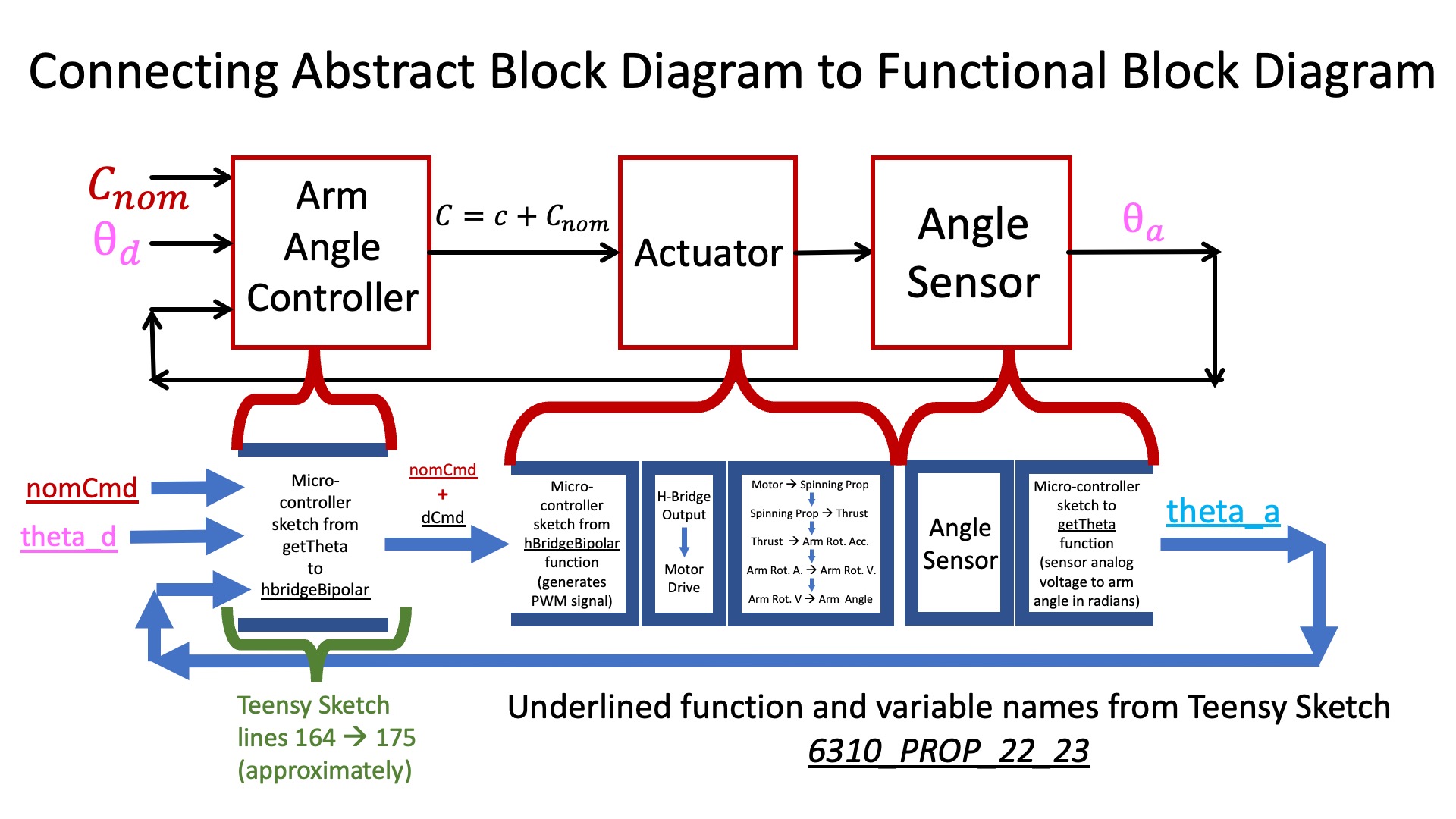
In the above diagram, the command being sent to the actuator (the motor command) is divided into two parts, C = C_{nom} + c. Note that C_{nom} was set to a fixed value during calibration, one that produced enough propeller thrust to exactly cancel gravity when \theta_a = 0 (the horizontal arm case). If we assume that the propeller arm remains nearly horizontal, then we can ignore gravity and the thrust produced by C_{nom}, and focus on relating c ("little c") to \tau_a, the torque responsible for propeller arm angular acceleration.
From Torque to Rotational Velocity to Angle
If \Delta T is small enough, the sampled arm angular velocity can be related to the arm torque by the difference equation
We can assemble the above pair of difference equations into a matrix-vector description,
Simple Relation between Motor command and Arm torque
As we noted above, if the c part of the motor command is non-zero, then gravity will not exactly cancel propeller thrust, and the torque produced by the excess thrust,\tau_a will accelerate the arm. The simplest model for the relationship between c[n] and \tau_a is a scale factor, as in
As a first step, let us use the model to eliminate \tau_a from our matrix-vector formulation, as in
Proportional Control
By proportional control, we mean that
If the desired angle is zero (a level arm), \theta_d[n]=0 for all n, then c[n] = K_p\left(-\theta_a[n]\right) and the matrix-vector description becomes
Root Locus
Determine an analytic formula for the complex natural frequencies of the above 2^{nd}-order difference equation model of propeller-arm (the eigenvalues of the the above 2 \times 2 matrix), as a function of \gamma_a and K_p. Use your formula to HAND-DRAW the associated root-locus plot (the eigenvalues versus K_p starting from K_p=0.) in the complex plane. In your drawing, be sure to clearly indicate the unit circle.
Based on your root-locus plot, how will the arm behavior change as you change K_p? Will the arm oscillate faster or slower, will the amplitude of those oscillations grow or decay faster or slower? And what about the behavior of your arm for very small values of K_p? What would you expect based on your root-locus plot, and what do you see experimentally?
As you probably guessed, friction stabilizes the propellor arm when the proportional feedback gain is low, and since friction is not included in our model, the model-experiment inconsistency is not surprising.
Extracting \gamma_a
In Checkoff 2, you found the small values of K_p (proportional gain) for which your arm produced growing oscillations. Oscillations are almost always undesirable when feedback systems are used for control, but are highly desirable when using data to calibrate models. Oscillation frequency is easy to measure precisely, and is particularly informative when that frequency is primarily dependent on a single model parameter. As your root-locus plot above should have made clear, in the simple second-order propeller-arm model, oscillation frequency depends primarily on the product of the model parameter \gamma_a and the proportional feedback gain K_p.
Redo the experiment of checkoff 2 and find the smallest K_p that produces growing oscillations, but this time use a larger starting offset (150 milliradians) and measure the oscillation frequency. Using the larger offset should reduce the K_p needed for growing oscillations, so you should also be able to measure the oscillation frequency for both twice AND half the proportional gain. During each experiment, be sure to pause the serial plotter after two or three periods of the oscillation, so that you measure the most linear behavior.
PLEASE NOTE: Keep in mind that \Delta T = 0.001 seconds, and that the plotter plots every tenth sample (so there are one hundred plotted points per second).
By comparing your three measured oscillation periods for three different K_p's to your natural frequency formula, you should be able estimate \gamma_a for your model, and validate your estimate. It may be useful to review the "Polar Form" section of the prelab, here, and take note of the approximation for the magnitude and angle of a complex number z = a + jb when a \approx 1 and |b| << 1. In this case, the magnitude of z, M = |z| = |a + jb| is approximately 1, and b = M \sin{\phi} \approx \phi.
Friction or Derivative Feedback Stabilization
Physical analogies can be misleading when first learning about feedback control, but in the case of the propeller arm with PD control, perhaps the intuitive insight is worth the risk. So, consider the above proportional control experiments on the arm. After you set a gain, you pull on the arm, then let go and then watch the arm oscillate. That sounds a lot like pulling on a spring, then letting it go, and watching it oscillate. Also, spring forces are typically proportional to displacement from equilibrium, with stiffer springs generating larger forces. Analogously, proportional feedback produces a "force" on the arm that is proportional to the error in angular position, and is scaled by the proportional feedback gain K_p. Increasing K_p increases the force generated per unit displacement, analogous to stiffing a spring.
Pull on a spring, and at least in this reality, its oscillation will not grow in time. That is, springs don't go unstable, but our propeller arm does, a flaw in our analogy. Regardless, the spring's oscillations are "dampened" by friction, so we might expect that friction will stabilize the propeller. In fact, we have already seen the stabilizing effect of friction, friction wa stabilizing our propeller arm at low proportional feedback gains.
Friction forces are typically proportion to velocity, the time derivative of position, so perhaps it is not so surprising that one can "damp out" the arm's oscillation by adding a feedback term that is proportional to rotational velocity. We can be a little more precise about this, as described below.
Friction
The propeller arm is more stable than predicted by the model analyzed above, and as mentioned before, that is almost certainly because we did not model friction contributions to arm torque. For our propeller arm, the most likely source of arm friction is air resistance which, given the arm's low rotation speeds, scales roughly linearly with arm rotational velocity.
Consider adding a linear friction term to the equation for arm torque,
Using this updated torque formula in the 2x2 matrix representation of our model,
An aside: If you want to convince yourself about air resistance, try the following experiment on your propeller arm. Set the arm's proportional gain high enough so that when you displace the arm and let go, the arm oscillates with amplitude that decays slowly. Then retry the experiment while holding one of the very large lego plates horizontally, about two inches below the spinning propeller. The air-blocking effect of the nearby plate should increase air resistance, which should visably accelerate oscillation decay.
Derivative (or Velocity) Feedback
Suppose we set the motor command equal to a weighted combination of angle and angular velocity. That is, suppose the motor command is
Adding derivative feedback is equivalent to increasing the friction coefficient, as can be seen by comparing the above 2 \times 2 matrix, modeling PD control of a frictionless arm, to the previous section's 2 \times 2 matrix, modeling proportional control of an arm with friction. This connection can help us develop intuition about why friction stablizes the arm (because it is like derivative feedback) or conversely, we can reason about the impact of derivative feedback by interpreting it as increased friction.
Model Inaccuracy.
In deriving the above PD model, we assumed that arm torque tracks motor command, instantly, but in lab1, we modelbut since arm torque is a function of instantaneous propeller speed, and but we already know i inaccurate. is acufrom Arm torque is a function of propeller speed, and in Lab1 we developed a model for how propeller speed builds up from that propeller speed does FIX THIS
No model is perfect, and we have used inaccurate models to make reasonably accurate predictions about proportional control stability (our first-order model of the speed controller, which was really second-order, was surprisingly effective). Can our "instant-torque" propeller-arm PD-control model can be used to accurately predict controller behavior?
To find out, let us try a quick experiment. If model and experiment do NOT match, we have a conclusion, we definitely need a better model. But if model and experiment DO match, we DO NOT have a conclusion. All we can say is that the model is accurate for one particular case.
For K_d = 0.2, use the above PD model (with your \gamma_a) to predict the maximum K_p for which the arm is stable. Compare your model result to the actual propeller arm by repeating the checkoff 2 propeller arm experiment, but this time with K_d set to 0.2 (1 0.2 in the send window). Try slowly increasing K_p using the send window (e.g. 3 2.5 in the send window), and testing for stability after each change by perturbing the arm 150 milliradians and letting go. What does the comparison of model and experiment tell you?
Checkoff Four
Show your root locus plot and your formula for oscillation frequency version K_p for the second-order model above. For small values of K_p, how does the behavior predicted by your model differ from behavior of your system? What was the smallest K_p to produce growing oscillations when starting from a 150 milliradian offset. Show plots of the propeller arm under proportional control for that K_p, twice that K_p and half that K_p. What are the three oscillation periods for those three cases, and are their ratios consistent with your formula for the oscillation frequency versus K_p. Try estimating \gamma_a from the three oscillation periods and associated proportional gains. How well do these estimates agree? Set K_d = 0.2 for your propeller arm and for the PD controller model. Find, experimentally, the maximum K_p for which your propeller arm is stable. How did the the maximum stable K_p for your model compare to your experiment? What have you concluded about the efficacy of the above PD controller model? Do we need a better one?
Matrix Root-Locus and Trajectory Tool (MRLTT)
In the lab sections that follow, you will investigate improving the stability and steady-state disturbance rejection of your propeller arm controller by adding the discrete-time equivalents of derivative and integral feedback to the proportional feedback you analyzed above. To determine a good weighted combination of proportional, integral and derivative (PID) feedback, that is to determine the gains K_p, K_i, and K_d, will we need a comprehensive model we can use to explore the design space.
We have already seen experimentally that adding derivative feedback stabilizes the arm (when we made K_d nonzero), but there other consequences. Arm angle derivatives typically change more rapidly than arm angle, so motor commands pro duced by proportional plus derivative (PD) controllers change more rapidly, rapidly enough to invalidate the above assumption that torque changes instantly with motor command. If we want to model our controllers accurate enough to determine good controller gains, we will need a more accurate model.
For a 2 \times 2 matrix, eigenvalues are easily computed by hand, but a system that models both derivative and integral feedback AND a non-instant command to torque model will be larger, and its eigenvalues too time-consuming to compute by hand. So we've included a browser-based Matrix Root-Locus and Trajectory Tool (below) that you can use directly on this page.
You can use the tool to analyze arm controllers with P, PD, or PID feedback, with gains K_p, K_d, (described above) and K_i (described below) using models parameterized by \gamma_a, (described above) and \beta (described below), though the models must be in the form of a parameterized matrix.
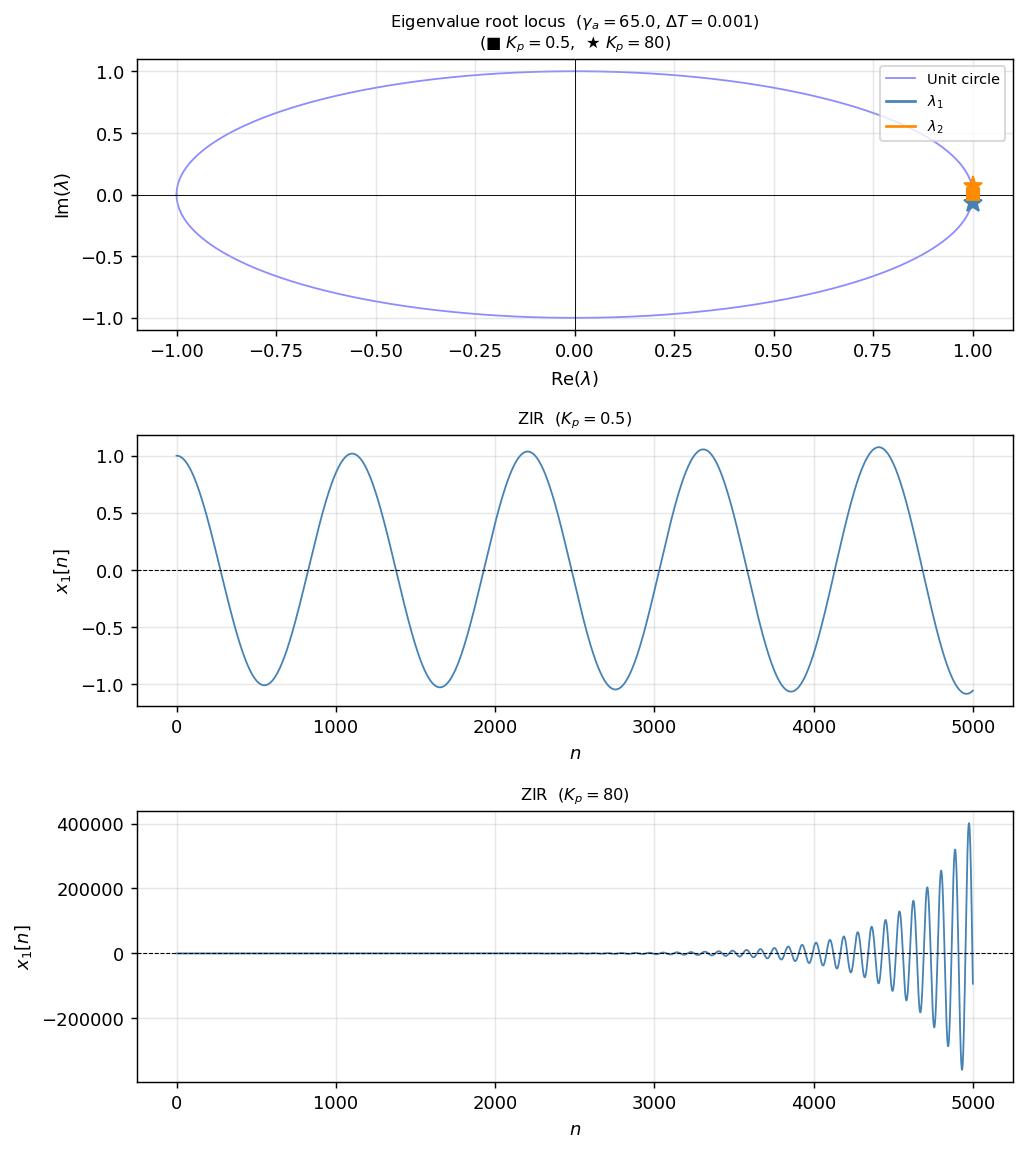
For example, below we show a proportional-only example with \gamma_a = 65, \beta = 0, sweeping K_p from 0.5 to 80 (using zoom=True to show the zoomed unit circle). If you use zoom, you can see two eigenvalues start near 1 on the real axis, meet, then travel along the unit circle and eventually leave it as K_p grows — confirming that proportional control alone can never damp the oscillations.
Using MRLTT
The Matrix Root-Locus and Trajectory Tool embedded below lets you examine eigenvalue (or natural frequency) root-locus plots and zero-input responses directly on this browser page, so that you can easily visualize how the natural frequencies move, and can compare simulated ZIR responses to experimental measurements.
As you saw last week, our propeller arm is fairly slow. Even under feedback control, the time for the arm to half-way to steady state takes more than a quarter of a second. On the other the hand, the arm angle is being sampled a 1000 times a second (so \Delta T = 1e-3). This large dichotomy between sample rate and settling time implies that important natural frequencies must be extremely close to 1.0, so that \lambda^{250} \approx 0.5. For that reason, MRLTT, by default, crops root locus plots to the region aroudn 1.0, often dropping natural frequencies near 0. Use zoom=False to see the full unit circle.
Use this tool to analyze a discrete-time state-space system x[n] = A\,x[n-1] by entering the system matrix A as a Python nested list. Matrix entries may be expressions involving any of the five named quantities: Kp, Kd, Ki, G (for \gamma_a), and B (for \beta). Matrices from 2×2 up to 5×5 are supported.
Input format: enter the matrix followed (optionally) by comma-separated parameters:
- Kp=[lo,hi], Kd=[lo,hi], or Ki=[lo,hi] — sweep ONE gain over a range for the root-locus plot; the others are fixed scalars.
- Kp=value, Kd=value, Ki=value — fix a gain at a scalar value (default: Kp=1, Kd=0, Ki=0).
- G=value, B=value dT=value— set the model constants \gamma_a and \beta (default: G=1, B=0, dT=0.001).
- x0=[v1,v2,...] — initial condition vector for a ZIR trajectory plot (default: first state = 1, rest = 0). Only used when no gain is swept.
- n=[start,end] — sample range for trajectory plots (default: n=[0,40]).
- zoom=True or zoom=False — zoom the root-locus panel in around the unit circle (default: zoom=True) (may drop natural frequencies far from one). Use zoom=False to see the full complex plane.
Some Examples
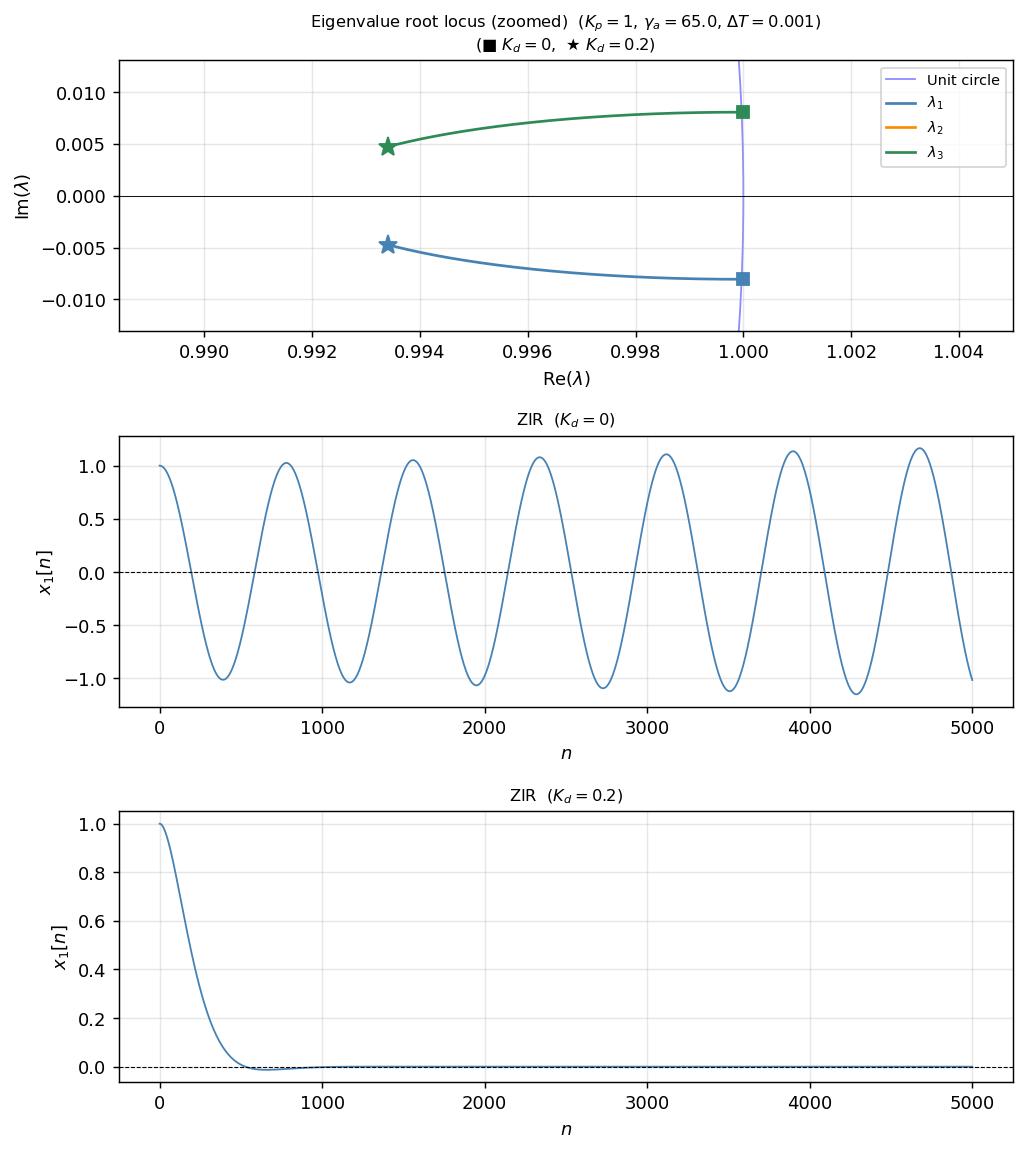
Example — a 3×3 PD arm model sweeping K_d from 0 to 0.2 with K_p=1 and \gamma_a=65 specified via G:
[[1,0,dT],[1,0,0],[-G*(dT*Kp+Kd), G*Kd, 1]], Kd=[0,0.2], Kp=1, G=65, zoom=False
Any valid entry earns full credit — this is a design exploration tool.
Below we show a PD example (m=1, K_p=1 fixed) sweeping K_d from 0 to 0.2. At K_d=0 (■) the complex eigenvalue pair sits right on the unit circle; as K_d increases the pair is pulled inside, stabilising the arm. Note the third eigenvalue (near the origin) that comes with the m=1 look-back state.
Please keep in mind that you will need to scale your experimental results when comparing step responses to the tool's ZIR plots (the tool assumes initial arm angle is 1 radian, and all other states are initially zero). Once you have derived the A matrix for your own system, enter it into the tool with your estimated \gamma_a and sweep K_p to reproduce plots like those above.
Using MRLTT to Evaluate a Velocity Approximation
Our propeller arm system does not have a sensor for measuring arm angular velocity directly, so the Teensy sketch computes an estimate of the velocity using a difference approximation
If the desired arm angle, \theta_d[n] = 0 for all n (we "desire" to keep the arm horizontal), the motor command calculated by the Teensy sketch for PD control is equivalent to
For the case m=1, we can use a three-state vector difference equation to model the PD controller,
The matrix in the above system (the m=1 case) is 3 \times 3, so it has three eigenvalues, and therefore three natural frequencies. Suppose m =3 (the default setting in the Teensy sketch), how many natural frequencies would there be?
Try comparing the PD controller model from before checkoff 4 to the above model that includes the Teensy sketch's difference approximation for velocity (with m = 1). You can use these two inputs to the MRLTT, the first using the model from before checkoff 4, and the second using the model from this secion.
[[1,dT],[-GdTKp,1-GdTKd]], Kd=0.3,Kp=[2,10],G=65,zoom=False
[[1,0,dT],[1,0,0],[-G*(dTKp+Kd),GKd,1]],Kd=0.3,Kp=[2,20] G=65, zoom=False
What differences do you see between the two sets of plots? Try running them again with zoom=True differences do you see? What do you think explains the differences (HINT: think about the initial conditions.)
Motor Command to Arm Torque Model
When the propeller thrust produces arm torque, changes in thrust track changes in propeller speed instantly but nonlinearly, being approximately proportional to the square of the instantaneous propeller speed. Like thrust and propeller speed, changes in motor voltage track changes in motor command instantly, but unlike the propellor-thrust relationship, the voltage-command relationship is linear, with motor voltage being proportional to motor command. One relationship is definitely NOT instantaneous and also not linear, the relationship between changes in propeller speed and changes in motor voltage. Together these observations suggest that a model relating changes in arm torque to changes in motor command will NOT instantious and will be FAR FROM linear, but that is only half right. The motor command to arm torque relationship is suprisingly linear (fortuitous cancellations no doubt), though definitely NOT instantaneous.
Above we used oscillation period measurements versus proportional control gain (K_p) to calibrate \gamma_a, using a model in which we assumed that the relationship between motor command and arm torque was given by
In the equations for the model of the previous section, does not appear explicitly as a variable because we used the instant model and some algebra to eliminate it. But if we want to model the fact that arm angular acceleration does not instantly track motor command, we need to introduce it as a state variable, and describe its evolution with an associated difference equation. One possible first-order model of arm angular acceleration is
In the above equation, if the motor command is a constant, i.e. c[n] = c[\infty], and \frac{1}{\Delta T} > \beta > 0 , then what is \lim_{n \rightarrow \infty} \alpha_a[n]? And if the the motor command is NOT a constant, but \beta = \frac{1}{\Delta T}, what is the relationship between \alpha_a[n] and c[n].
Assuming that \theta_d[n] = 0 for all n and that we can we can substitute \omega_a[n] for the difference approximation in the Teensy sketch, \left( \frac{\theta_a[n] - \theta_a[n-m]}{m \Delta T} \right), then the motor command is given by
What are the formulas for A_{3,1}, A_{3,2}, and A_{3,3}. Enter the formulas below using valid python expressions. Also, use B for \beta, dT for \Delta T, (note that dT has a CAPITAL T), G for \gamma_a, Kp for K_p and Kd for K_d.
Implementing and Calibrating the Non-instant model.
Now that you have derived the formulas for A_{3,1} through A_{3,3}, enter the complete 3\times3 non-instant model into the Matrix Root-Locus and Trajectory Tool above, using your own \gamma_a estimate and a starting guess for \beta in the range [1, 200]. To give you a sense of what to expect, here is an example plot for \gamma_a = 65, \beta = 0, K_p=1 fixed, sweeping K_d from 0.02 to 0.2. There are now three eigenvalue branches. The one (near 1 + \Delta T \cdot \beta \approx 0.97) is visible to the left on the real axis — it barely moves as K_d changes, since it mainly reflects the motor dynamics controlled by \beta. Compare this to the simpler PD plot above and note how the branch shapes differ once the non-instant model is included.

- How does the ZIR change with changing \gamma_a?
- How does the ZIR change with changing \beta?
We suggest trying (and taking screenshots of) the following experiments on your propeller arm, and then using the tool above with various values of \gamma_a and \beta until you can match simulation and experiment. To generate a ZIR experimentally, lift one end of the arm (that is, rotate the arm upwards 200 milliradians or so), and then let go.
- Set K_d = 0.1 (type "1 0.1" in the send window) and K_p = 1.0
- Hold the arm approximate 0.2 radians above horizontal and then let go. Halt the plotter (be quick, so you capture the initial response) and record the result (take a screenshot).
- Increase K_p to K_p = 1.5, and then to K_p = 2.0 , and retry your lift-and-let-go arm experiment. Are the natural frequencies and ZIR responses from the tool for these higher values of K_p consistent with your experiments? If not, adjust \beta and PERHAPS slightly adjust \gamma_a and try again.
A good strategy for finding \gamma_a and \beta is to start with the \gamma_a you found when just using proportional control, and the try values for \beta in the range [1,200].
How did you resolve the discrepancy between the PD model that presumes \omega[n] can be measured directly, and the model that includes the Teensy sketch's difference approximation of arm velocity? Is it necessary for a model of PD arm control to use the more accurate difference approximation to velocity, or is assuming the availability of \omega_a[a] good enough. Describe your estimates of \gamma_a (which should be equal or very close to the value you found in the previous checkoff) and \beta. Show us your changes to the model, and explain how they implement the "non-instant" motor model. What properties of the ZIR are most affected by changes in \gamma_a? What properties are most affected by \beta? Show us the ZIR responses that you measured and the corresponding responses from the model. How similar are the measured and modeled oscillation frequencies and the rate of oscillation amplitude decay (or growth if your model or experiment is unstable).
Better in the Long Term.
PID (Proportional, Integral, Derivative) controllers are ubiquitous in feedback systems, though for discrete-time systems, it would be more accurate to refer to such controllers as PSD (Proportional, Sum, Delta). An ad-hoc approach to designing a PSD controller is to select a proportional feedback gain, K_p, and then increase the gain of the Delta (or derivative) feedback, K_d, until the step response is sufficiently stable. Finally, add Sum (or integral) feedback, with gain K_i, to eliminate any remaining steady-state error.
So if we can easily run experiments, even automate the running of those experiments, what is the value of modeling? With a model we can get far more information than just the result of a single input-output experiment. In particular, we can compute the closed-loop system's natural frequencies as a function of PID controller gains, K_p, K_d, and K_i,, which will tell us how the system will response to a whole of range of inputs and disturbances. We can use the model to generate plots of how those poles (another name for natural frequencies) move as functions of gain parameters (a generalization of classic "root-locus" plots). Such plots can tell us what is feasible, like when we used a plot of poles versus proportional gain above to show it was impossible to stabilize the arm with proportional gain alone, or to show that our "instant torque" model predicted stability for an absurdly large range of proportional gains, so was too inaccurate to use for PD controller design.
Testing Integral Feedback
We can add an integral, or more precisely, a sum feedback term to our controller. The advantage of including an integral term is that any persistent error, no matter how small, will cause the sum to grow steadily. When the sum term is large enough, it will cause an adjustment to the motor command, persumably an adjustment that eliminates the small error.
Unfortunately, when we test controllers using integral or sum feedback, we can no longer compare model and experiment using the lift-arm-and-drop approach. Once you force a persistent error by lifting the arm, the sum will grow and grow and by the time you let go the arm, the sum will be so large it will drive the propeller arm out of range. A better experimental approach is to avoid forcing a persistant error, and instead monitor the response of your arm to an input that moves the arm from one steady-state another steady-state . To do this experimentally, set the arm input's amplitude to 0.1 (type 6 0.1 in the send window) and its period to 0.1 (type 5 0.1 in the send window).
You can use MRLTT to examine gains versus natural frequencies, which will help you design your controller, and thanks to linearity, you can match MRLTT's ZIR simulation to the propeller arm's behavior for the senario describe above, thanks to linearity and the judicious choice of input. As long as your arm is in steady-state before the input, \theta_d, jumps from +0.1 radians above horizontal to -0.1 radians below, its behavior during its transistion will be just like a ZIR response, provided you set matching INITIAL CONDITIONS.
PID Equations
The motor command with the proportional, delta, and sum feedback can be described by the difference equations
Aside: If you are paying very very very close attention, and compare how the error sum is formed and used on lines 130 through 144 in the Teensy sketch, you might notice an inconsistency between what is in the sketch and the sum equation in the model above. Ignore it. End Aside.
We can form the 4 \times 4 matrix equation for the PID controller,
In the above matrix equation, the error sum became a fourth state variable, and compared to PD controller model, the matrix has an extra row and column. The third row of the 4\times4 A matrix gains one additional entry, A_{3,4}, relating arm acceleration to the error sum state. Derive A_{3,4} and enter it below (use Ki for K_i, G for \gamma_a, B for \beta, dT for \Delta T):
Designing and Testing the PID Controller.
In this section you will analyze the new closed-loop system and conduct experiments to understand the model's predictive power. When K_i > 0, the error sum becomes a fourth state variable, extending the A matrix to 4\times4. Once you have derived and checked your formula for A_{3,4} above, enter the full 4\times4 matrix into the tool, using your calibrated \gamma_a and \beta values. To give you a sense of what the tool should produce, here is an example sweeping K_i from 0 to 5 with K_p=1.5, K_d=0.1, \gamma_a=65, \beta=30:
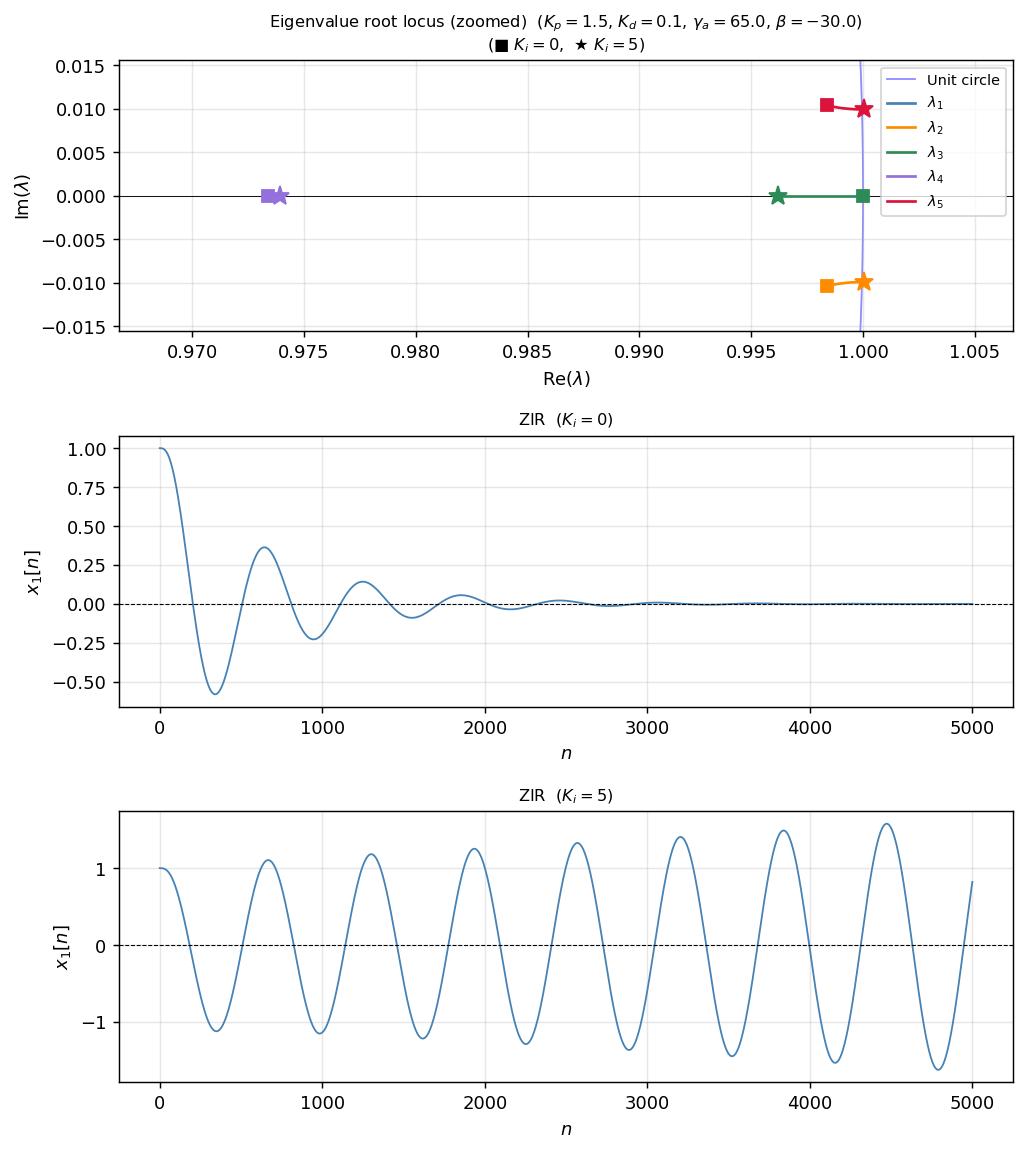
The integrator pole (■ at \lambda=1 when K_i=0) moves to the right as K_i increases — the ★ at K_i=5 is just outside the unit circle, indicating instability. The complex-conjugate pair moves only slightly. Use the tool with your own \gamma_a and \beta to find the range of K_i values for which all eigenvalues remain inside the unit circle, then sweep K_p and K_d at your chosen K_i to design your controller.
Try the following experiments:
- Compare the tool's ZIR response to your arm's response when K_i > 0. As mentioned above, you cannot compare using the lift-arm-and-drop approach when there is an integral term — once you lift up the arm, the error sum starts growing and will be very large before you let go, whereas the tool assumes all initial conditions are zero except the initial angle. A better approach is to monitor the response of your system to input step changes, and exploit the linearity of the system. To do this, set the input's amplitude to 0.1 (type
6 0.1in the send window) and its period to 0.1 (type5 0.1). - Examine the integral term, does it settle to a significantly different value when $\theta_d = 0.1$ then when $\theta_d = -0.1?$ If so, the ZIR may not match your observed response. How could you correct this in the MRLTT simulator (HINT: Initial Conditions).
- Once you are satisfied that you have a reasonable match between your arm and the tool's simulation, use the complete model to design the gains of your controller. What are you going to try to minimize? Note: There are practical tradeoffs to make here. The higher the gains, particularly the K_d gain, the more noise in measurement will affect the output. The lower the proportional gain, and the higher the derivative gain, the slower the step response and the greater the error. There is no 'correct' answer, but rather, many answers can be justified. Use the tool and your model!
- How is the rejection of transient and steady-state disturbances affected by including the integral (aka sum) term? To see the advantage of using the integral term, try dropping a Lego "U" on the arm as shown in the picture below.
Checkoff 6:
-
Demonstrate disturbance rejection as follows. Find values for
KpandKd(withKi=0) so that the measured step response converges within a second. Then increaseKito decrease the disturbance caused by dropping the LEGO U on the propeller arm. What values ofKp,Kd,Kiwork best? -
Use the Matrix Root-Locus and Trajectory Tool to find values for K_p and K_d that yield good step responses when K_i = 10.
-
Show that the simulation matches the experiment. Did you have to change any intitial conditions? How would you decide what changes to make.
-
Try tilting the arm plate and dropping it (DURING THE INTERVIEW!). What do you see?
-
Compare measured results with and without the integral (sum) term.
-