Closing the Loop around K(s)H(s)
Please Log In for full access to the web site.
Note that this link will take you to an external site (https://shimmer.mit.edu) to authenticate, and then you will be redirected back to this page.
Are Poles Sufficient?
For the systems we consider in this class, ones accurately-modeled by sets of linear differential equations, the system (or transfer) function completely characterizes the system. And in general, H(s) can be expressed in factored form,
Here, \{s_{z_1},s_{z_2},\ldots s_{z_M}\} are the roots of the numerator polynomial and are called zeros of H(s) because these are the values of s for which H(s)=0 and \{s_{p_1},s_{p_2},\ldots s_{p_N}\} are the roots of the denominator polynomial and are called poles of H(s) because these are the values of s for which H(s)=\infty.
If we have a feedback system with primary input y_{desired}(t), and the input to the "plant" described by H(s) is
For example, suppose your system is described by a set of differential equations
If you want to control the system described by H using feedback, then you can define a control transfer function K(s), such as a "single zero" controller for example (or equivalently, a PD controller),
For a simple feedback system, in which the control is
Consider the example an earlier prelab, the simplified second-order model of the arm with friction coefficient of 3 and gravity coefficient of -2. In this case,
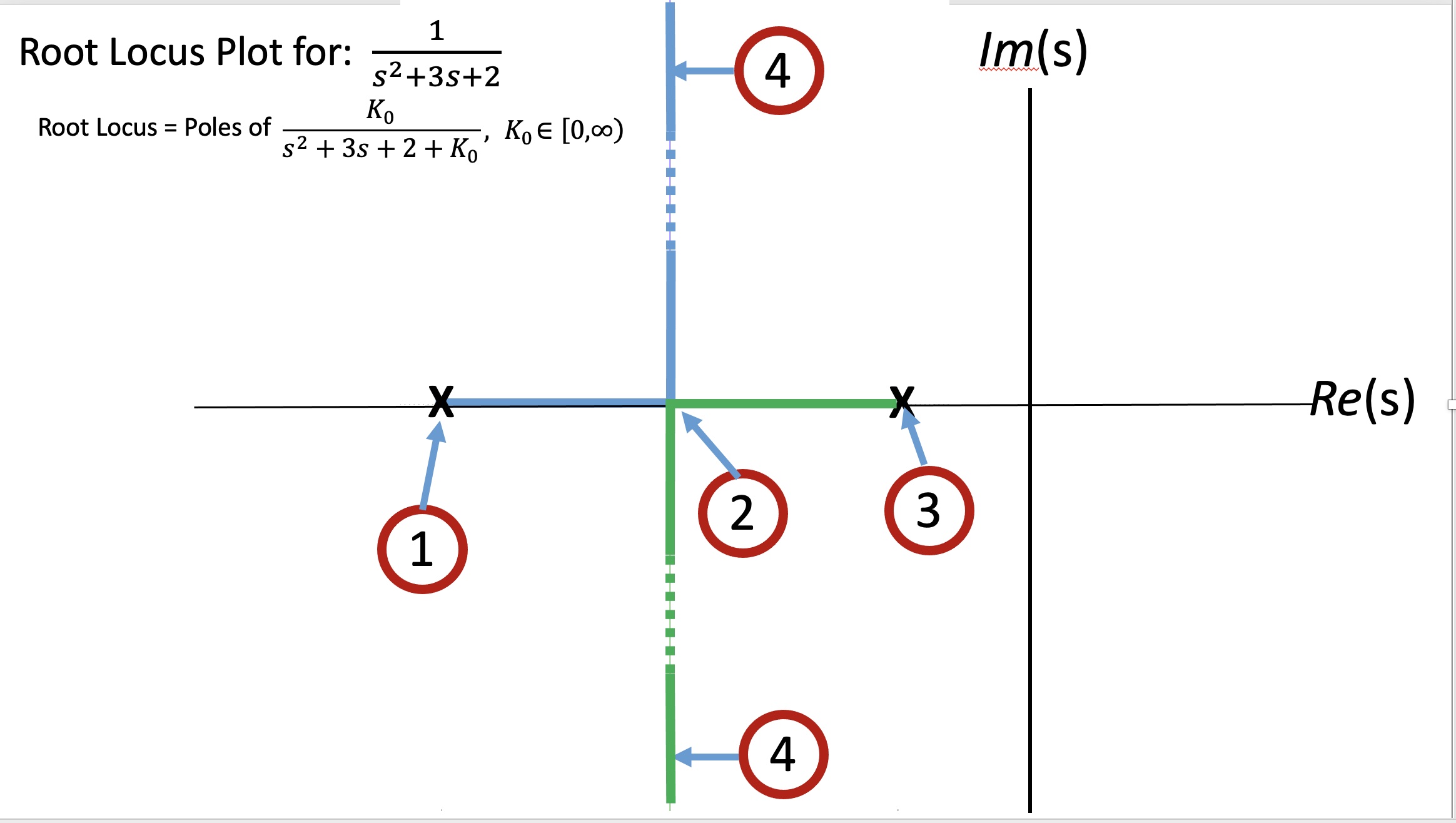
The figure above is a root locus plot for

You will need to find G(s) to answer the following.
The root locus plot has a pair of points labeled 4 (a pair because real transfer functions have complex conjugate poles). What is the positive imaginary part of the poles at points 4? And what is K_0? For that you will need more information.
Consider the step response below, the imaginary part can be related to the period of oscillation, but hmmm, the time axis is missing. So the period is impossible to estimate, or is it? Can you use what you know about the the decay rate?
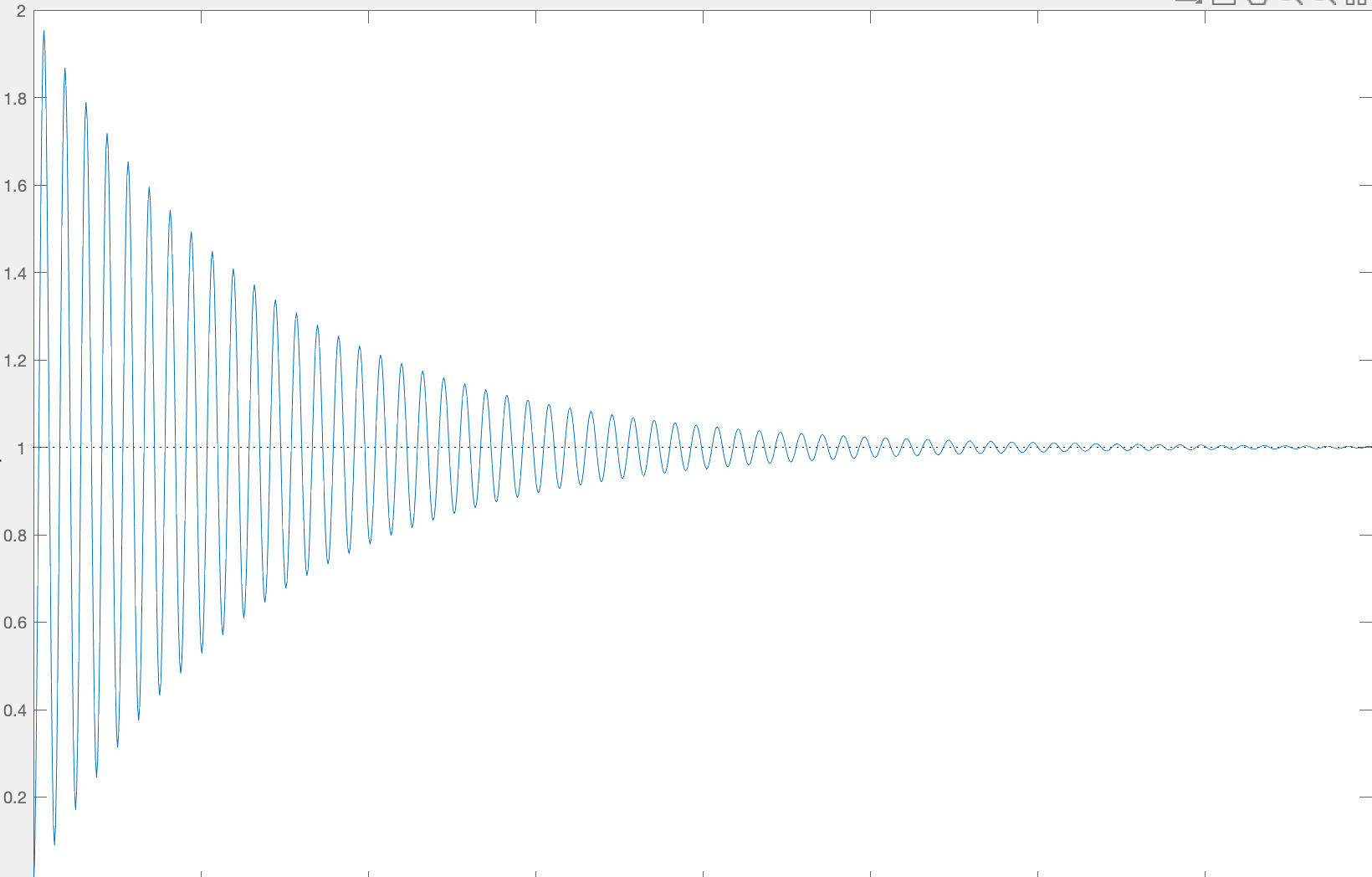
This is a relatively open-ended question. To answer it, think about what pieces of data you are given (i.e., the plot). What are you trying to extract? How will what you extract help you solve the problem?